
БНБ
"БСЭ" (95279)
- Photogallery
- Естественные науки - Математика - Технология
- Авиация и машиностроение
- Высокие технологии
- Вычислительная техника
- Нанотехнология
- Роботехника
- Энергетика
- Электроника
Управления система с переменной структурой
Определение "Управления система с переменной структурой" в Большой Советской Энциклопедии
 |
| Система управления с переменной структурой (структурная схема) |
Особенности СПС можно пояснить на примере простейшей системы автоматического управления (САУ), поведение (движение) которой описывается дифференциальным уравнением
 , (1)
, (1)
 |
| Системы автоматического управления (фазовые портреты) |
 : (структура I), а при отрицательной
: (структура I), а при отрицательной  (структура II). Для наглядного представления поведения (движения) САУ строят её фазовые портреты (см. Фазовой плоскости метод) для структуры I (рис. 2, а) и структуры II (рис. 2, б).
(структура II). Для наглядного представления поведения (движения) САУ строят её фазовые портреты (см. Фазовой плоскости метод) для структуры I (рис. 2, а) и структуры II (рис. 2, б).
Задача состоит в том, что требуется выбрать такое управление и из класса возможных управлений, при котором система обладает асимптотической устойчивостью. Из анализа фазовых портретов системы следует, что ни положительная, ни отрицательная обратная связь порознь не решает поставленной задачи. Поэтому в соответствии с методами СПС реализуют следующее правило изменения структур:
(2) , c = const, 0 < c <
, c = const, 0 < c <  .
.
Фазовый портрет такой системы изображен на рис. 2, б; из анализа портрета следует, что изображающая точка из произвольного начального положения попадает на прямую s = 0, проходящую через начало координат, в окрестности которой фазовые траектории направлены навстречу друг другу и, следовательно, изображающая точка не может покинуть эту прямую. Траектория s = 0 не принадлежит ни одной из структур (I или II), поэтому, согласно (2), за счёт переключения управления и в системе происходит смена структур теоретически с бесконечной частотой. Такой режим движения называется скользящим, а за уравнение движения принимается уравнение прямой s = 0: , c > 0. (3)
, c > 0. (3)
Все решения уравнения (3) стремятся к нулю при t ® ¥, т. е. поставленная задача решена. Существенно, что движение системы в скользящем режиме не зависит от характеристик объекта управления и коэффициент обратной связи, качество переходного процесса определяется только выбором параметра с.
Рассмотренный пример показывает, что посредством сочетания неприемлемых порознь структур и за счёт использования скользящих режимов можно синтезировать СПС, обладающие рядом положительных свойств, в частности апериодической устойчивостью и параметрической инвариантностью. С помощью СПС решается широкий круг задач теории управления, например задачи высококачественного воспроизведения задающего воздействия при инвариантности к параметрическим и внешним возмущениям, многосвязного регулирования, оптимизации и др.
Лит.: Емельянов С. В., Системы автоматического управления с переменной структурой, М., 1967; Системы с переменной структурой и их применение в задачах автоматизации полёта, М., 1968; Теория систем с переменной структурой, М., 1970; Уткин В. И., Скользящие режимы и их применения в системах с переменной структурой, М., 1974.
Б. З. Голембо, С. К. Коровин.
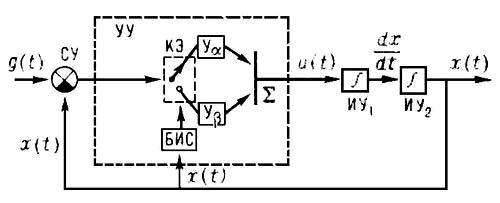
Рис. 1. Функциональная схема системы управления с переменной структурой: УУ — устройство управления; СУ — сравнивающее устройство; КЭ — ключевой элемент; БИС — блок изменения структуры; ∑ — сумматор; Уa — усилитель с коэффициентом передачи a; Уb — усилитель с коэффициентом передачи b; ИУ — интегрирующие устройства; g(t) — задающее воздействие; u(t) — управляющее воздействие; x(t) — управляемая величина.
I); б — с отрицательной обратной связью (структура II); в — с переменной структурой; I — область движения системы со структурой I; II — область движения системы со структурой II; 0 — начало координат; x — управляемая величина; t — время." href="/a_pictures/18/10/252249474.jpg">I); б — с отрицательной обратной связью (структура II); в — с переменной структурой; I — область движения системы со структурой I; II — область движения системы со структурой II; 0 — начало координат; x — управляемая величина; t — время."http://iodine.atomistry.com/">I); б — с отрицательной обратной связью (структура II); в — с переменной структурой; I — область движения системы со структурой I; II — область движения системы со структурой II; 0 — начало координат; x — управляемая величина; t — время." src="a_pictures/18/10/th_252249474.jpg">
Рис. 2. Фазовые портреты систем автоматического управления: а — с положительной обратной связью (структура I); б — с отрицательной обратной связью (структура II); в — с переменной структурой; I — область движения системы со структурой I; II — область движения системы со структурой II; 0 — начало координат; x — управляемая величина; t — время.
| "БСЭ" >> "У" >> "УП" |
Статья про "Управления система с переменной структурой" в Большой Советской Энциклопедии была прочитана 1103 раз
| Бургер двойного помола |
| Креветки с газировкой |
TOP 20
- Лемке Михаил Константинович
- Сульфгидрильные группы
- «Казарменный коммунизм»
- Японское море
- Периодическая система элементов
- Объединённая партия гаитянских коммунистов
- Глициния
- Башкирская Автономная Советская Социалистическая Республика
- Иммунитет (историч.)
- Андаманское море
- Сенсуализм
- Балкано-кавказская раса
- «Сообразительный»
- Навигация (морск.)
- Звёздная астрономия
- Ямполь (пос. гор. типа в Донецкой обл.)
- Кульчицкая Елена Львовна
- Мандельштама - Бриллюэна рассеяние
- Театральные учебные заведения
- Электрическая постоянная