
БНБ
"БСЭ" (95279)
- Photogallery
- Естественные науки - Математика - Технология
- Авиация и машиностроение
- Высокие технологии
- Вычислительная техника
- Нанотехнология
- Роботехника
- Энергетика
- Электроника
Дифференциальная геометрия
Определение "Дифференциальная геометрия" в Большой Советской Энциклопедии
 |
| Дифференциальная геометрия. Рис. |
 |
| Дифференциальная геометрия. Рис. |
Сущность методов Дифференциальная геометрия, применяемых для выяснения локальных свойств геометрических объектов, проще всего уяснить на примере локального исследования формы кривых.
 |
| Дифференциальная геометрия. Рис. |
 |
| Дифференциальная геометрия. Рис. |
 |
| Дифференциальная геометрия. Рис. |
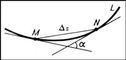
или как скорость изменения (вращения) касательной к L (рис. 2):
где a — угол между касательными в точках М и N, а Ds — длина дуги MN.
 |
| Дифференциальная геометрия. Рис. |
 |
| Дифференциальная геометрия. Рис. |
x = j(t), y = y(t), z = c(t). (1)
 |
| Дифференциальная геометрия. Рис. |
Кривизна и кручение вычисляются по формулам
s = r"r"r""/[r", r"]2,
в которых [r", r"] — векторное, a r"r""r"" — смешанное произведение (см. Векторное исчисление).
 |
| Дифференциальная геометрия. Рис. |
 |
| Дифференциальная геометрия. Рис. |
 |
| Дифференциальная геометрия. Рис. |
 |
| Дифференциальная геометрия. Рис. |
Обычно для исследования строения поверхности используются так называемая первая и вторая основные квадратичные формы поверхности.
Пусть поверхность S определена параметрическими уравнениями:
x = j (u, v), y = y (u, v), z = c (u, v). (2)
При фиксированном значении v уравнения (2) определяют на S линию, называемую координатной линией u. Аналогично определяется линия v. Координатные линии u и v образуют на S параметрическую сеть (если, например, сферу радиуса 1 задать параметрическими уравнениями
х = cos u cos v, у = cos u sin v, z = sin u,
то параметрической сетью линий u и v будут меридианы и параллели этой сферы). Величины u и v называются также внутренними координатами, т.к. точка на поверхности есть точка пересечения проходящих через неё координатных линий, т. е. может быть найдена путём построений на поверхности без обращения к объемлющему пространству.
Радиус-вектор r произвольной точки М на S определяется уравнениями (2) как функция u и v. Частные производные ru и rv этой функции суть векторы, касательные соответственно к линиям u и v. Эти векторы в точке М лежат в касательной плоскости к S в М. Векторное произведение [ru, rv] определяет нормаль к S в точке М.
Пусть s — длина дуги линии L на S и пусть u = f (t), v = g (t) — параметрические уравнения во внутренних координатах. Тогда, вдоль L r и s будут функциями от t, причём дифференциал s определяется равенством ds2 = dx2 + dy2 + dz2, правая часть которого есть скалярный квадрат вектора dr = rudu + rvdv, т. е. ds2 = dr2. Поэтому
ds2 = r2udu2 + 2rurvdudv + r2vdv2.
С помощью обозначений r2u = Е, rurv = F, r2v = G выражение для ds2 можно записать в виде
ds2 = Edu2 + 2Fdudv + Gdv2. (3)
Правая часть соотношения (3) называется первой основной квадратичной формой поверхности S. С помощью этой формы можно измерять длины дуг на поверхности путём интегрирования выражения
вдоль рассматриваемой дуги. Поэтому форма (3) называется также метрической формой поверхности. Первая форма определяет также внутреннюю геометрию поверхности, т. е. совокупность фактов, которые могут быть получены путём измерений на поверхности, без обращения к объемлющему пространству. Внутренняя геометрия поверхности не меняется при её изгибании — деформации поверхности как абсолютно гибкой и нерастяжимой плёнки.
Вторая основная квадратичная форма поверхности представляет собой выражение
Ldu2 + 2Мdudv + Ndv2,
в котором L = ruun, М = ruvn, N = rvvn (n — единичный вектор нормали к S в точке М). С помощью второй формы можно получить представление о пространственной форме поверхности. Например, кривизны 1/R нормальных сечений поверхности в данной точке М (т. е. линий пересечения S с плоскостями, проходящими через нормаль в М) вычисляются по формуле
Две основные формы поверхности, заданные в каких-либо внутренних координатах, определяют поверхность с точностью до положения в пространстве. Если заданы две формы
Edu2 + 2Fdudv + Gdv2
и
Ldu2 + 2Mdudv + Ndv2,
первая из которых положительная, а коэффициенты L, M и N второй удовлетворяют некоторой системе уравнений, из которых одно (полученное К. Гауссом) алгебраическое, а два других (полученные К. М. Петерсоном) — линейные дифференциальные уравнения с частными производными первого порядка, то найдётся поверхность, для которой эти формы являются соответственно первой и второй основными формами.
Отмеченные уравнения Гаусса — Петерсона играют фундаментальную роль в теории поверхностей.
Подробнее о поверхностях см. Поверхностей теория.
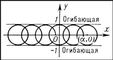
Одним из объектов исследований в Дифференциальная геометрия являются семейства кривых и поверхностей. Такие семейства задаются посредством уравнений, содержащих параметры. Например, уравнение (х - a)2 + у2 = 1, содержащее параметр a, определяет семейство окружностей радиуса 1 с центрами в точках (a, 0), т. е. на оси Ox (рис. 12). С семейством кривых (поверхностей) связано понятие огибающей — такой кривой (поверхности), которая касается всех кривых (поверхностей) семейства. В рассмотренном выше примере огибающей будет пара параллельных оси Ox прямых, отстоящих от неё на расстоянии 1. Особенно детально в Дифференциальная геометрия исследованы двупараметрические семейства прямых b в пространстве, называемые конгруэнциями. Простейший пример конгруэнции — семейство параллельных прямых в пространстве. Истоком теории конгруэнций является геометрическая оптика.
Различные разделы Дифференциальная геометрия посвящены изучению во всевозможных аспектах так называемых дифференциально-геометрических многообразии. Примерами таких многообразий могут служить кривые (одномерные многообразия), поверхности (двумерные многообразия), обычное евклидово пространство (трёхмерное многообразие). Более сложным примером может служить четырёхмерное многообразие, элементами которого являются прямые обычного евклидова пространства (прямая в декартовых координатах определяется уравнениями вида z = ax + b, z = су + d; числа a, b, с, d можно рассматривать как координаты этой прямой).
Изучение дифференциально-геометрических многообразий ведётся по следующим основным направлениям. 1) Геометрия транзитивной группы отображений многообразия на себя, или геометрия «локальной группы» отображений. В тематику этих вопросов входят обычная классическая локальная Дифференциальная геометрия (изучение инвариантов группы движений евклидова пространства), аффинная, проективная и конформная геометрии (изучение инвариантов соответствующей группы преобразований). 2) Геометрия многообразий с римановой метрикой (римановых пространств), представляющая собой обобщение на многомерный случай внутренней геометрии поверхностей, которое можно рассматривать как двумерные римановы пространства. Геометрия римановых пространств играет важную роль в теории относительности. 3) Геометрия так называемых финслеровых пространств, являющихся обобщением римановых пространств. 4) Геометрия многообразий со связностью, т. е. многообразий, в которых указан способ, с помощью которого можно сравнивать геометрические образы, расположенные в касательных пространствах в разных точках.
Возникновение Дифференциальная геометрия связано с именами Л. Эйлера и Г. Монжа. Ими к концу 18 в. были получены важные факты теории поверхностей. Значительный вклад в развитие Дифференциальная геометрия сделан в начале 19 в. К. Гауссом, который ввёл обе основные квадратичные формы. Им же была доказана теорема об инвариантности полной кривизны относительно изометрических преобразований. Фактически им были заложены основы внутренней геометрии поверхностей. Построение основ классической теории поверхностей было завершено в середине 19 в. основателем московской геометрической школы К. М. Петерсоном. В середине и во 2-й половине 19 в. много глубоких и общих результатов по классической теории поверхностей было получено Ф. Миндингом, Ж. Лиувиллем, Э. Бельтрами, Ж. Г. Дарбу, Л. Бианки. Ряд замечательных результатов по классической Дифференциальная геометрия был получен русскими учёными Д. Ф. Егоровым, Н. Н. Лузиным, С. П. Финиковым и др.
Развитие др. направлений в Дифференциальная геометрия связано с именами Б. Римана, Г. Ламе, Ф. Клейна, Г. Вейля, Э. Картана.
В СССР разрабатывались различные направления Дифференциальная геометрия; наибольшие успехи относятся к области проблем «в целом» (А. Д. Александров, А. В. Погорелов и др.).
Лит.: Монж Г., Приложение анализа к геометрии, пер. с франц., М. — Л., 1936; Стройк Д. Дж., Очерк истории дифференциальной геометрии до XX столетия, пер. с англ., М. — Л., 1941; Погорелов А. В., Дифференциальная геометрия, 5 изд., М., 1969; Рашевский П. К., Курс дифференциальной геометрии, 3 изд., М., 1950; Бляшке В., Введение в дифференциальную геометрию, пер. с нем., М., 1957; Рашевский П. К., Риманова геометрия и тензорный анализ, 2 изд., М., 1964; Александров А. Д., Внутренняя геометрия выпуклых поверхностей, М. — Л., 1948; Погорелов А. В., Внешняя геометрия выпуклых поверхностей, М., 1969.
Э. Г. Позняк.
| "БСЭ" >> "Д" >> "ДИ" >> "ДИФ" |
Статья про "Дифференциальная геометрия" в Большой Советской Энциклопедии была прочитана 1286 раз
| Коптим скумбрию в коробке |
| Семга на горелке |
TOP 20
- Лемке Михаил Константинович
- Сульфгидрильные группы
- «Казарменный коммунизм»
- Японское море
- Периодическая система элементов
- Башкирская Автономная Советская Социалистическая Республика
- Объединённая партия гаитянских коммунистов
- Глициния
- Иммунитет (историч.)
- Андаманское море
- Сенсуализм
- Балкано-кавказская раса
- «Сообразительный»
- Звёздная астрономия
- Навигация (морск.)
- Ямполь (пос. гор. типа в Донецкой обл.)
- Мандельштама - Бриллюэна рассеяние
- Театральные учебные заведения
- Кульчицкая Елена Львовна
- Электрическая постоянная